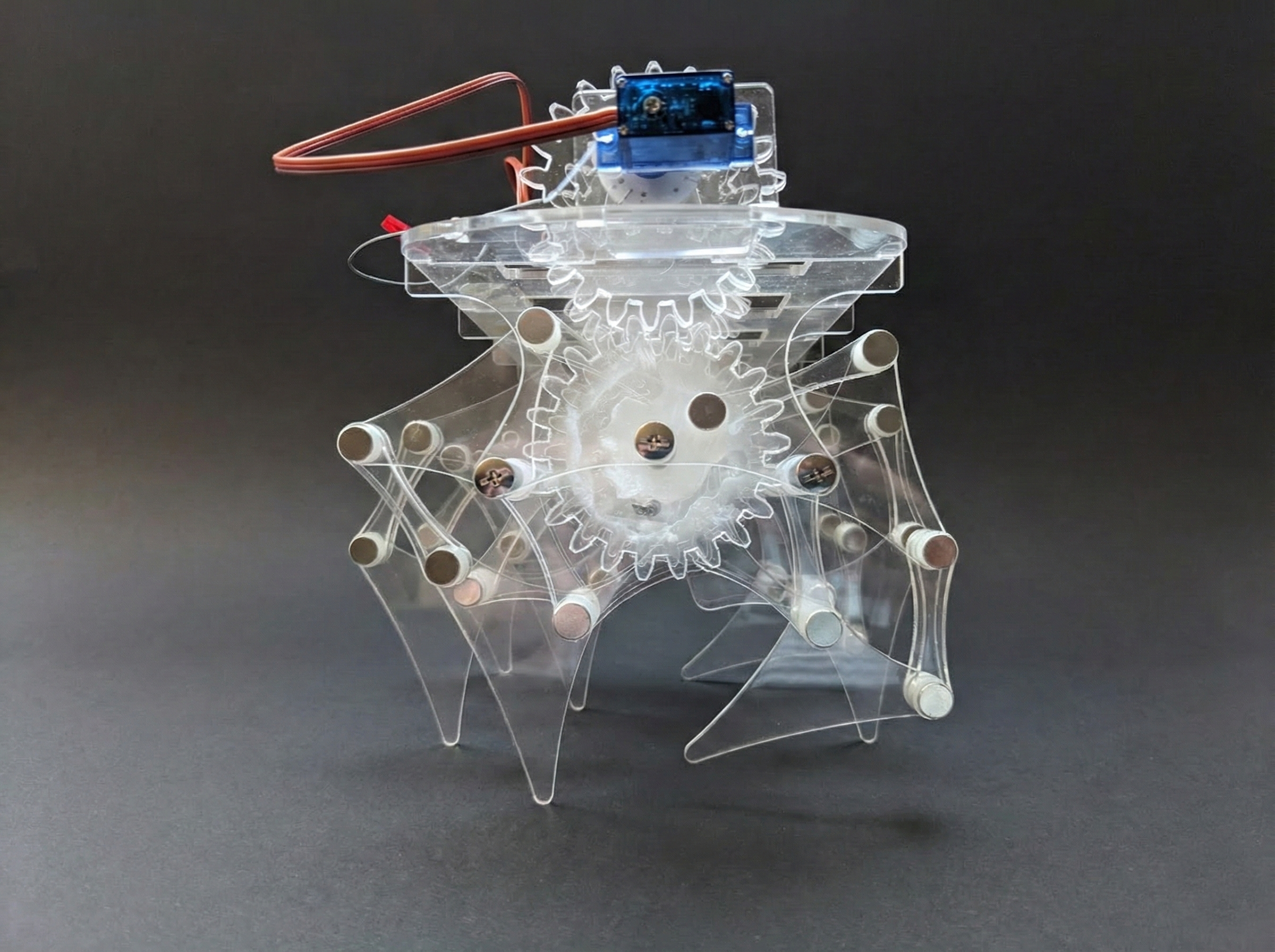
Custom RC Model Strandbeest
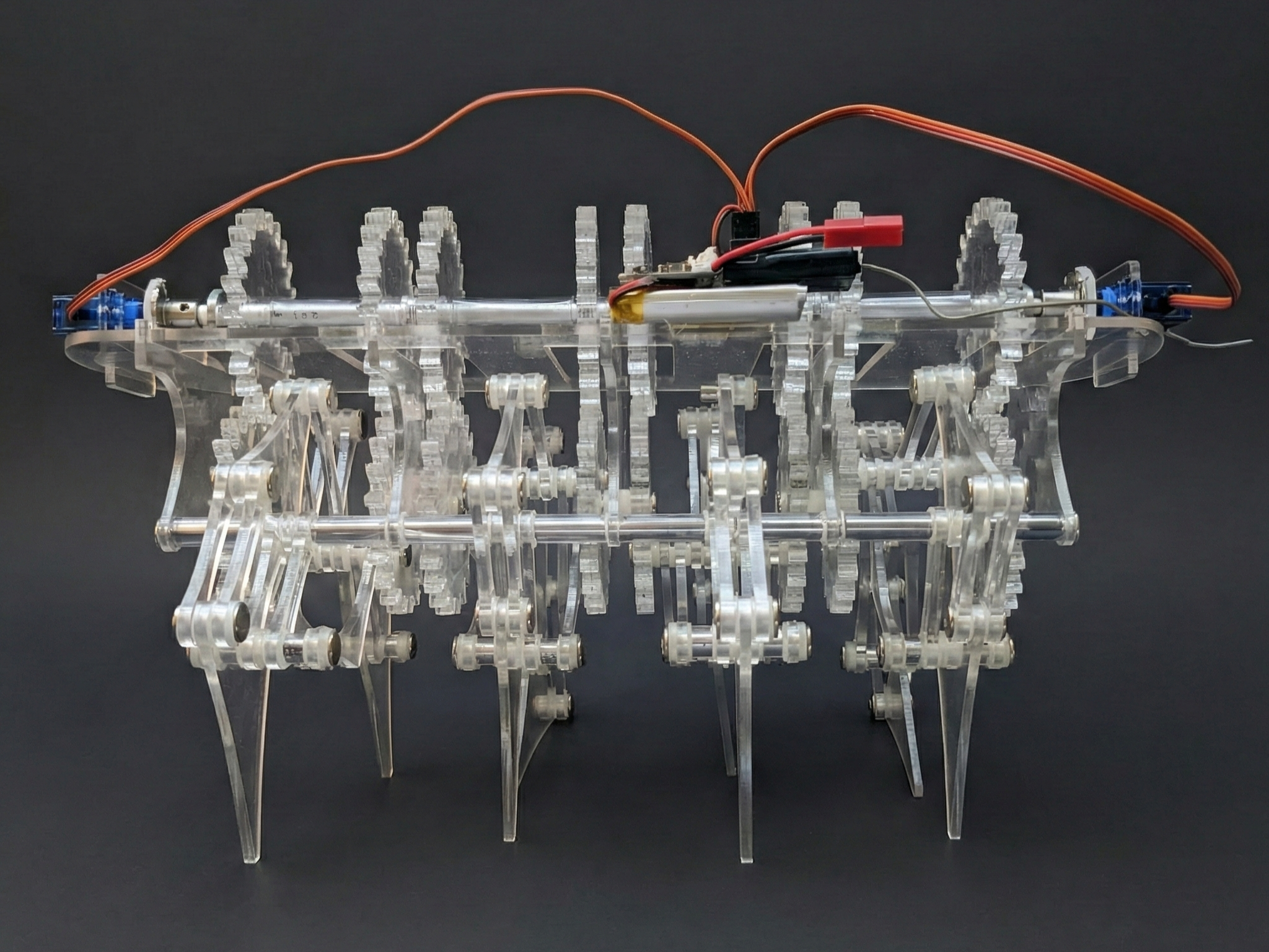
A radio-controlled walking robot based on Theo Jansen’s Strandbeest linkage — designed in Fusion 360, laser-cut from 300+ acrylic parts, and driven by a differential servo drivetrain.
Skills Demonstrated
- Kinematic linkage design and gait evaluation for walking mechanisms.
- CAD motion studies and drivetrain planning in Fusion 360.
- Precision fabrication and assembly of large multi‑part acrylic mechanisms.
Problem & Context
- Goal: free‑standing walker that can go forward/backward and turn in place.
- Context: personal design project (not a class or team assignment).
- Challenge: translating Jansen’s linkage into a compact, manufacturable drivetrain with reliable ground contact.
Process & Constraints
- Designed four pairs of legs in Fusion 360 using Jansen’s linkage proportions.
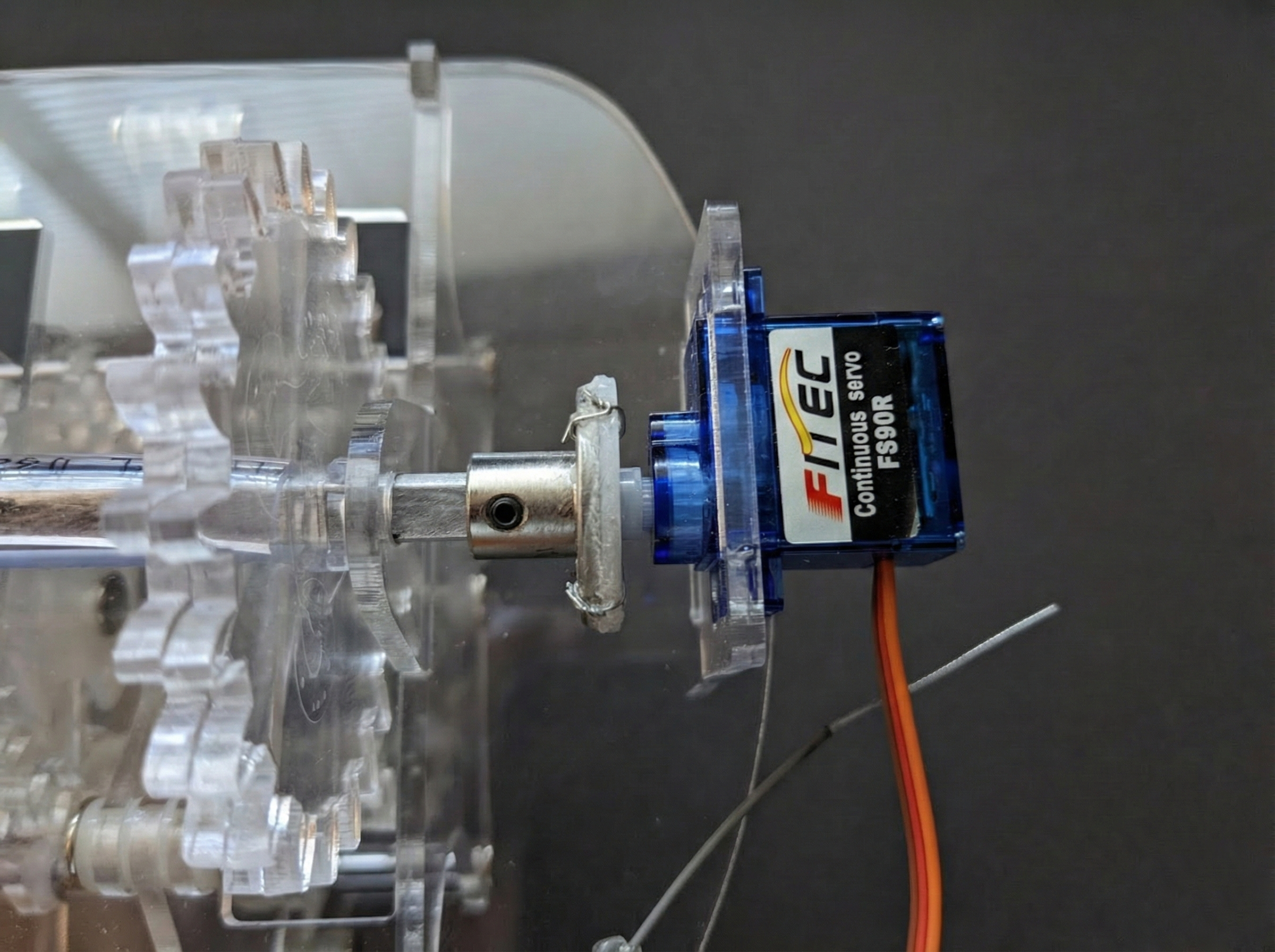
- Drive architecture: each leg pair on a common gear; two pairs per D‑profile axle.
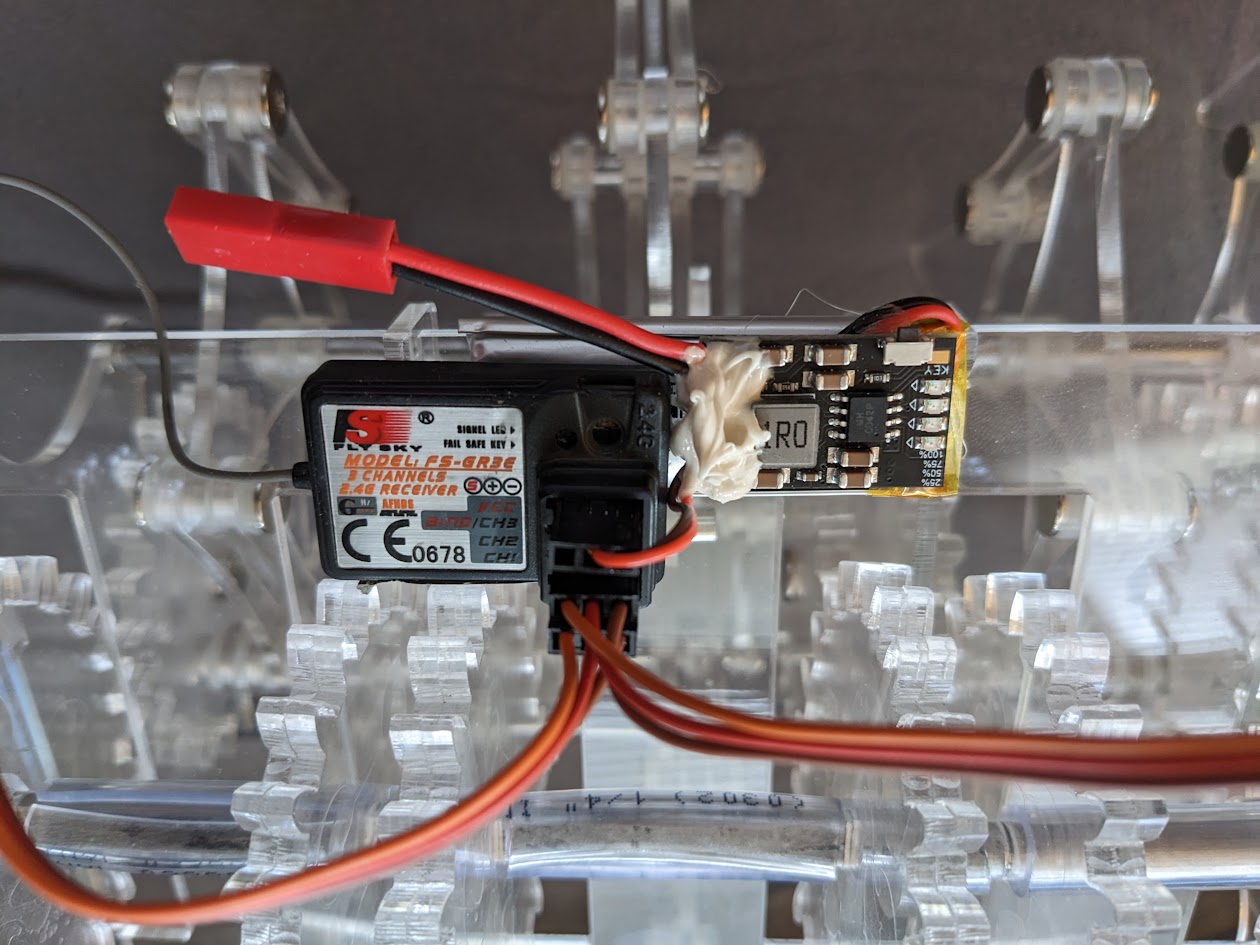
- Actuation: two 5V continuous‑rotation servos for differential drive.
- Simulation: rigid‑body kinematics with joint constraints to validate gait stability.
- Gait tuning: leg pairs offset to keep at least half the feet on the ground.
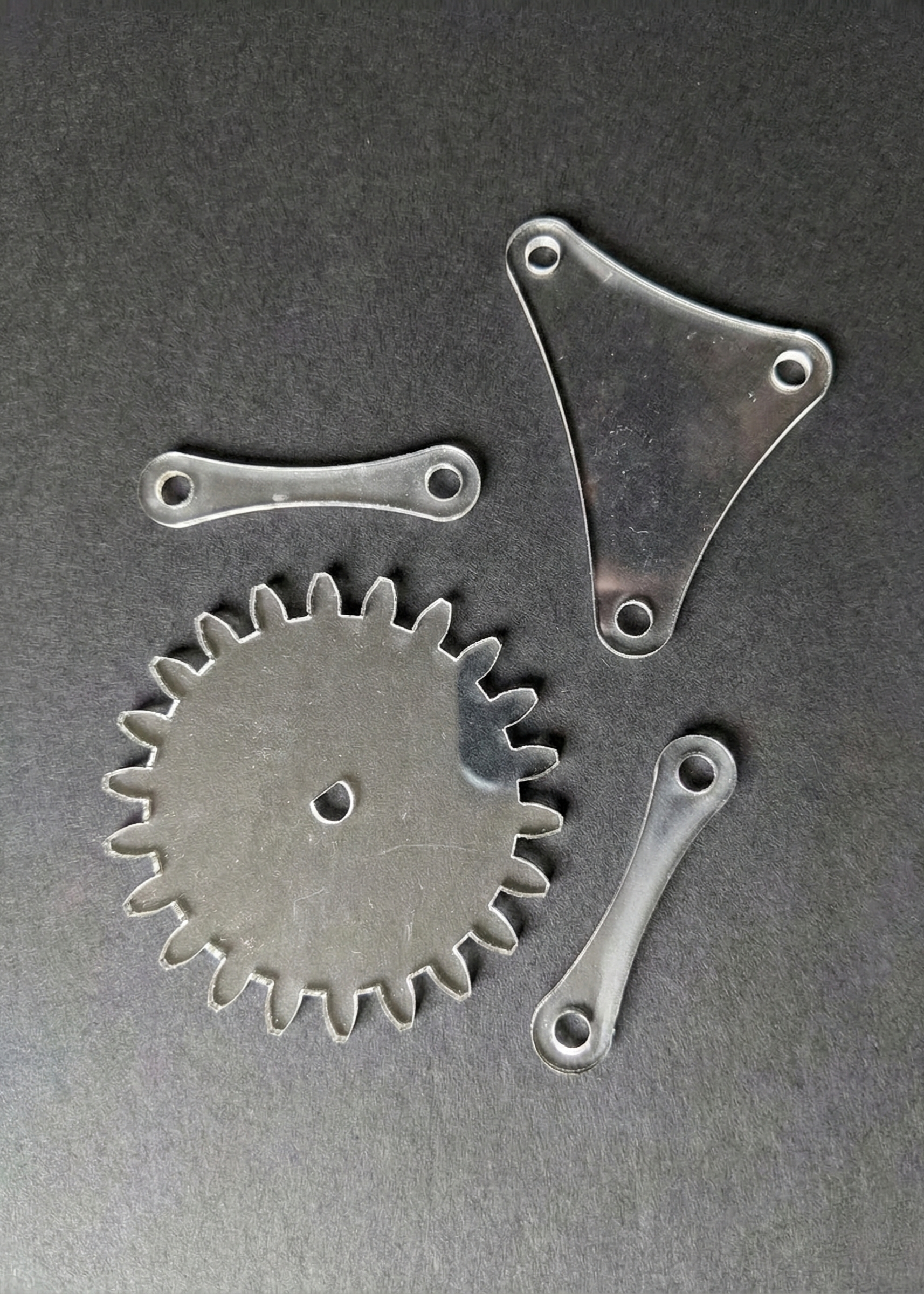
- Fabrication: 300+ acrylic parts (12 gait components) from 3mm cast acrylic.
- Workflow: DXF nesting in Deepnest, 50W CO2 laser cutting, iterative assembly/testing.
- Constraints: acrylic tolerances, joint friction, planar alignment, compact drivetrain.
Results & Impact
- Achieved stable, independent leg motion and controlled turning via differential drive.
- Validated a full design‑to‑fabrication pipeline for complex linkage systems.
- Strengthened skills in kinematic modeling, simulation‑driven design, and precision assembly.
Team & Contribution
- Individual project: owned full scope from concept through assembly and testing.
- Linkage design, motion‑study validation, drivetrain design, and fabrication.
Challenges & Fixes
- Issue: friction and binding at pin joints from planar misalignment.
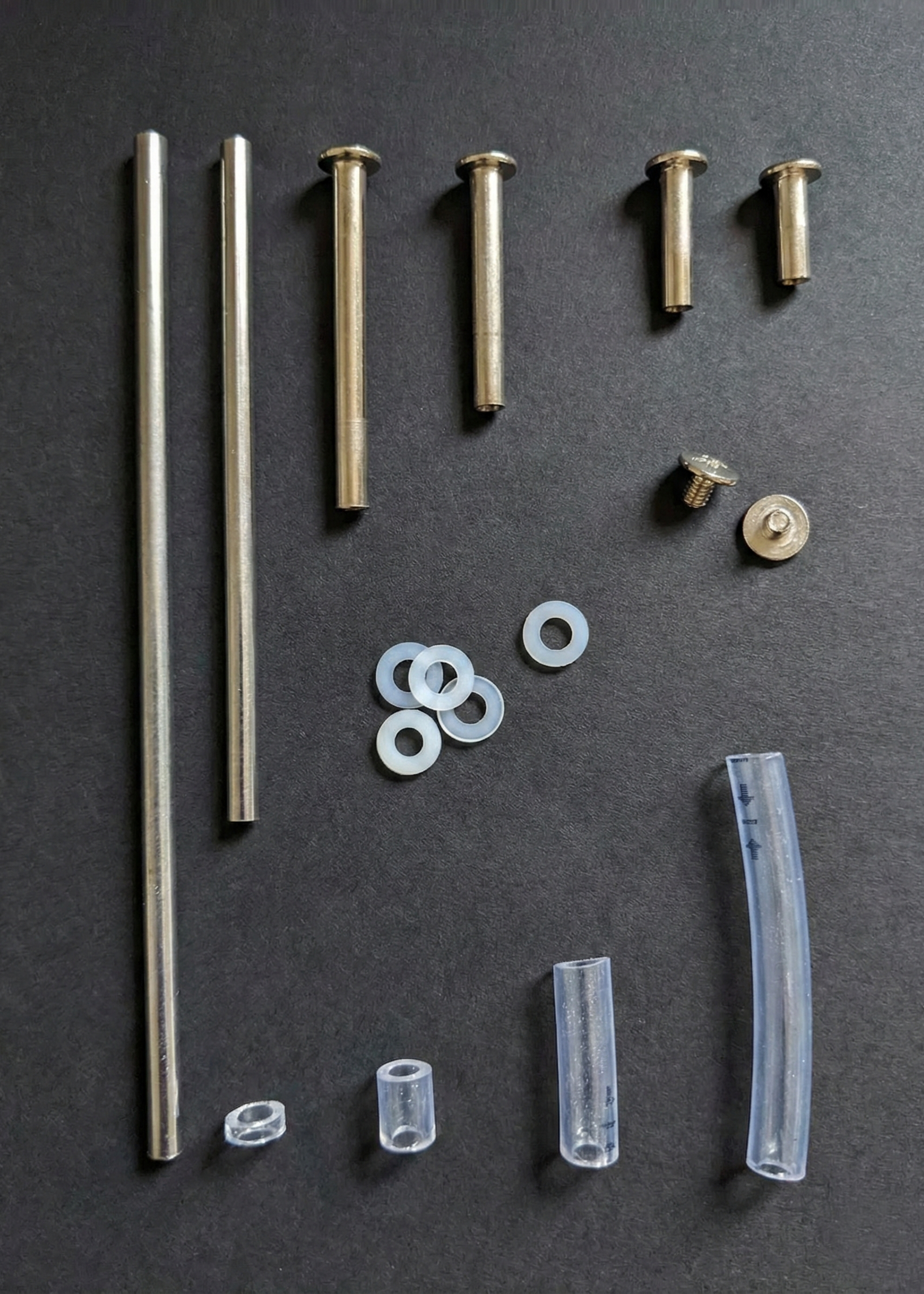
- Fixes: carriage bolts with Loctite, nylon washers, latex tube spacers, lubrication.
- Result: reduced friction enough for 5V servos to drive the full mechanism.
Media